Development of Automatic Mining System with Autonomous Perception
Date:
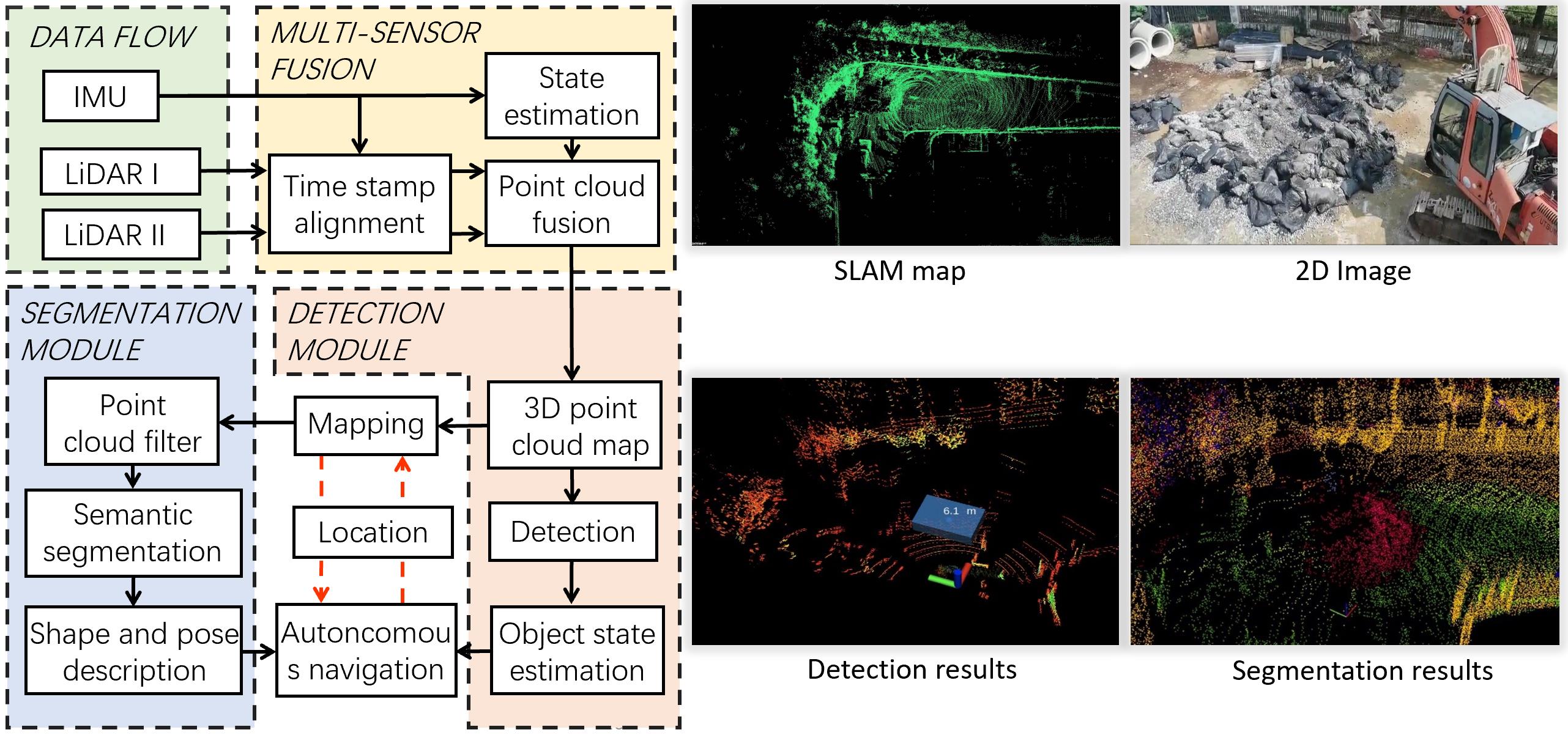
This project proposed an autonomous excavator system includes perception, autonomous navigation, and automated mining, and designed hydraulic system and automatic control system for autonomous excavator. I’m responsible for proposing a new LIDAR semantic segmentation network and apply it to the implementation of an automatic excavator together with real-time map building and 3D object detection.